本文假设需要排序的数组是 $A[]$,并且是不降序的排列 $(A[j]\ge A[i])_{j\gt i}$。
默认数组下标从 $0$ 开始。
插入排序
基础插入排序
一句话概括:从左往右遍历数组,将每次遍历到的元素 $A[i]$ 向左移动到可能的最左侧的位置 $j$,要求满足 $A[j+1]\gt A[j]$ 。(有点不严谨,但不影响理解)
void insertionSort(vector<int>& a) {
int n = a.size();
for (int i = 1; i < n; i++) {
int key = a[i], j = i;
while (j > 0 && key < a[j - 1]) {
a[j] = a[j - 1];
j--;
}
a[j] = key;
}
}插入排序性质
- 空间复杂度:$O(1)$。(这里指的是额外需要的辅助空间,不包括原数组的 $O(N)$)
- 时间复杂度:最优 $O(N)$,最劣 $O(N^2)$。平均情况下大概是 $\frac{N^2}{4}$,因此时间复杂度 $O(N^2)$。
- 稳定性:大小相同的元素相对位置不改变,因此插入排序是稳定的排序算法。
折半插入排序
一句话概括:在插入排序中枚举到第 $i$ 位时,左侧的 $A[0],\ldots,A[i-1]$ 一定已经是有序序列了,因此我们可以直接二分查找 $A[i]$ 应该插入的位置。
我的评价:虽然可以快速查找插入位置,但是无法优化所有元素右移这一操作的复杂度,实际复杂度变成了 $O(N\log N + N^2)$,不过还是快于普通的插入排序(因为查找这一过程得到了显著优化,比较的次数减少了)。
void insertionSort(vector<int>& a) {
int n = a.size();
for (int i = 1; i < n; i++) {
int key = a[i];
int p = upper_bound(a.begin(), a.begin() + i, key) - a.begin();
for (int j = i; j > p; j--) {
a[j] = a[j - 1];
}
a[p] = key;
}
}希尔排序
简单概括:
- 先将原序列划分为若干个子序列,划分方法是:先设置一个增量 $d$,然后原序列就可以划分为:
- $A[0],A[d],A[2d],\ldots,A[kd]$;
- $A[1],A[1+d],A[1+2d],\ldots,A[1+kd]$;
- ……
- $A[d-1],A[2d-1],A[3d-1],\ldots,A[-1+kd]$。
- 将上方这些子序列分别进行普通插入排序。
- 减小 $d$ 的值(比如每次除以 $3$),重复以上操作,直到 $d=1$。
// a是待排序数组,d是增量数组
void shellSort(vector<int>& a, vector<int>& d) {
int n = a.size();
for (auto& step : d) {
for (int i = 0; i < step; i++) {
for (int j = 1; i + step * j < n; j++) {
int cur = i + step * j, key = a[cur];
while (cur >= step && key < a[cur - step]) {
a[cur] = a[cur - step];
cur -= step;
}
a[cur] = key;
}
}
}
}希尔排序性质
- 空间复杂度:显然和插入排序一致,$O(1)$。
- 时间复杂度:取决于增量 $d$ 的取值序列,具体可以参考wiki。
- 稳定性:不稳定。
冒泡排序
简单概括:从后往前或从前往后扫描序列,每次比较相邻的两个元素大小。以从前往后扫描为例,如果 $A[j]\gt A[j+1]$ 则交换这两个元素,那么经过 $i$ 轮冒泡排序之后,末尾的 $i$ 个元素一定是最大的 $i$ 个元素,且有序排列。
void bubbleSort(vector<int>& a) {
int n = a.size();
for (int i = n; i > 0; i--) {
for (int j = 1; j < i; j++) {
if (a[j] < a[j - 1]) {
swap(a[j], a[j - 1]);
}
}
}
}也可以加上每趟排序后是否已经有序的特判:
void bubbleSort(vector<int>& a) {
int n = a.size();
for (int i = n; i > 0; i--) {
bool ok = true;
for (int j = 1; j < i; j++) {
if (a[j] < a[j - 1]) {
swap(a[j], a[j - 1]);
ok = false;
}
}
if (ok) {
return;
}
}
}冒泡排序性质
- 空间复杂度:$O(1)$。
- 时间复杂度:如果采用了每趟排序后是否已经有序的特判,那么最优 $O(N)$,最劣 $O(N^2)$。平均时间复杂度 $O(N^2)$。
- 稳定性:稳定。
快速排序
核心思路:
- 假设我们当前需要对子序列 $A[l],A[l+1],\ldots,A[r]$ 进行排序。选择一个pivot(基准元素),将剩余的元素划分为两部分。左半部分都是 $\le$ pivot的元素,右半部分都是 $\ge$ pivot的元素。(partition操作)
- 完成一次划分之后,至少能够确保我们选定的pivot元素已经被摆放到了正确的位置,假设该位置是 $mid$ ,然后我们继续递归子序列 $A[l],A[l+1],\ldots,A[mid-1]$ 和 $A[mid+1],A[mid+2],\ldots,A[r]$ 。
- 重复上述过程,直到完成排序为止。
快速排序最关键的就是partition操作,但是该操作并没有严格规定,因此实际上实现策略很多。
下面给出一种策略:
- 每次选择 $[l,r]$ 中最左侧的元素作为 $pivot$,设置左指针 $lo$ 和右指针 $hi$,一开始分别指向 $A[l]$ 和 $A[r]$。
- $hi$ 指针检查 $A[hi]$ 是否小于 $pivot$,如果不满足,则
hi--;如果满足,则说明该元素应该丢到基准元素的左侧,此时可以直接将 $A[hi]$ 丢到 $lo$ 指针指向的位置。 - $lo$ 指针检查 $A[lo]$ 是否大于 $pivot$,如果不满足,则
lo++;如果满足,则说明该元素应该丢到基准元素的右侧,此时可以直接将 $A[lo]$ 丢到 $hi$ 指针指向的位置。 - 重复上述的 $2,3$ 两步,直到 $lo$ 和 $hi$ 指针指向了同一个位置,此时我们可以确定 $A[lo]$ 往左一定全部 $\le pivot$,$A[hi]$ 往右一定全部 $\ge pivot$,因此最后我们令 $A[lo]=pivot$ 即可完成一次partition。
void quickSort(vector<int>& a, int l, int r) {
if (r <= l) return;
int lo = l, hi = r, pivot = a[l];
while (lo < hi) {
while (lo < hi && a[hi] >= pivot) --hi;
a[lo] = a[hi];
while (lo < hi && a[lo] <= pivot) ++lo;
a[hi] = a[lo];
}
a[lo] = pivot;
quickSort(a, l, lo - 1);
quickSort(a, lo + 1, r);
}快速排序性质
- 空间复杂度:一次 partition的空间复杂度是 $O(1)$(只需要一个pivot和左右指针即可)。因此总共的空间复杂度取决于递归时栈的深度,最优 $O(\log N)$,最劣 $O(N)$。平均 $O(\log N)$。
- 时间复杂度:取决于递归次数,最优 $O(N\log N)$,最劣 $O(N^2)$。平均 $O(N\log N)$。
- 稳定性:不稳定。(一个简单的例子是 $2,1,1$)
选择排序
一句话概括:第 $i$ 次遍历时,找到数组后 $i$ 个元素中最小的那个元素,然后将该元素放到第 $i-1$ 位。
void selectionSort(vector<int>& a) {
int n = a.size();
for (int i = 0; i < n; i++) {
int minVal = a[i], pos = i;
for (int j = i + 1; j < n; j++) {
if (minVal > a[j]) {
minVal = a[j];
pos = j;
}
}
swap(a[pos], a[i]);
}
}选择排序性质
- 空间复杂度:O(1)。
- 时间复杂度:最优、最劣、平均都是 O(N^2)。
- 稳定性:不稳定。(一个简单的例子:2,2,1)
堆排序
一句话概括:用数组 $A[]$ 建立一个小根堆,然后每次弹出堆顶元素。
struct heap { // 小根堆
private:
int n;
vector<int> hp;
public:
heap() : n(0) {}
heap(const vector<int>& a) : n((int)a.size()), hp(a) { // O(N)建堆
for (int i = (n - 1) / 2; i >= 0; i--) {
modify(i);
}
}
void modify(int p) { // 调整节点堆中的节点p
for (;;) {
int lc = 2 * p + 1, rc = lc + 1;
int lv = (lc >= n ? INT_MAX : hp[lc]); // 左儿子的权值
int rv = (rc >= n ? INT_MAX : hp[rc]); // 右儿子的权值
if (hp[p] <= lv && hp[p] <= rv) {
return;
} else if (lv < rv) {
swap(hp[p], hp[lc]);
p = lc;
} else {
swap(hp[p], hp[rc]);
p = rc;
}
}
}
int pop() { // 弹出堆顶元素
int res = hp[0];
swap(hp[--n], hp[0]);
modify(0);
return res;
}
};
void heapSort(vector<int>& a) {
int n = a.size();
heap hp(a);
for (int i = 0; i < n; i++) {
a[i] = hp.pop();
}
}$O(N)$ 建堆的理论很简单,实际上就是利用了二叉堆是一个完全二叉树的性质。我们在建堆时,实际上只需要调整所有的非叶子节点,而在完全二叉树中,叶子节点的数量占总结点数的一半,因此我们在建堆时只需要调整前一半的节点就行了。
假设堆的高度为 $h$ ,若要调整第 $i$ 层的某个节点,那么至多将该节点下放 $h-i$ 次,并且完全二叉树第 $i$ 层的节点个数至多 $2^{i-1}$ 个,同时只有前一半的节点需要调整,因此可以计算出建堆的复杂度上限是 $4N$ ,即线性的复杂度。
堆排序性质
- 空间复杂度:$O(1)$。(上方的实现并不是 $O(1)$ 的,构造了一个heap的结构体)
- 时间复杂度:最优、最劣、平均均为 $O(N\log N)$。
- 稳定性:不稳定。
归并排序
简单概括(二路归并):
- 首先,如果我们需要将两个有序数组排序,显然有 $O(N)$ 的归并算法(双指针扫一圈)。
- 将待排序数组划分为 $\lceil \frac{n}{2}\rceil$ 个集合:
- ${{A[0]},{A[1]}},{{A[2]},{A[3]}},{{A[4]},{A[5]}}\ldots$ 然后对上方的集合内部分别归并(相邻的集合两两合并),完成一轮归并后就有:
- ${{A[0],A[1]},{A[2],A[3]}},{{A[4],A[5]},{A[6],A[7]}},\ldots$ 然后继续对上方的集合进行归并……直到最后只剩下一个集合。
- 显然,每次归并都会使得集合数量折半。
void mergeSort(vector<int>& a) {
int n = a.size();
vector<int> b(n);
for (int d = 1; d < n; d <<= 1) {
for (int i = 0, p = 0, q = d;; i++, p = q, q += d) {
if (q >= n) break;
// p是归并时的左指针 q是右指针
int l = q, r = min(n, q + d); // l是左指针的右端点 r是右指针的右端点
for (int j = p; j < r; j++) {
if (p == l) {
b[j] = a[q++];
} else if (q == r) {
b[j] = a[p++];
} else if (a[p] < a[q]) {
b[j] = a[p++];
} else {
b[j] = a[q++];
}
}
for (int j = l - d; j < r; j++) {
a[j] = b[j];
}
}
}
}归并排序性质
- 空间复杂度:$O(N)$。(需要一个辅助数组暂存归并过程)
- 时间复杂度:最优、最劣、平均都是 $O(N\log N)$。
- 稳定性:稳定。
基数排序
简单概括(最低位优先LSD):
- 基数排序(十进制下)是先准备 $10$ 个桶(链表),首先根据每个数的个位数字,将它们划分进这些桶中。完成一轮划分后,按照个位数字的大小,将每个桶中的数字依次取出(顺序是 $0,1,2,\cdots,9$),再存回数组 $A$。
- 然后,根据每个数的十位数字,将它们划分进这些桶中。完成一轮划分后,按照十位数字的大小,将每个桶中的数字依次取出(顺序是 $0,1,2,\cdots,9$),再存回数组 $A$。
- 然后,根据每个数的百位数字,将它们划分进这些桶中……
- 重复上述过程,直到枚举到了所有数字的最高位为止。
void radixSort(vector<int>& a) {
const int N = 9; // 最高位位数
int n = a.size();
for (int i = 0, base = 1; i < N; i++, base *= 10) {
vector<int> bucket[10];
for (auto& j : a) {
bucket[j / base % 10].emplace_back(j);
}
for (int j = 0, k = 0; j < 10; j++) {
for (auto& e : bucket[j]) {
a[k++] = e;
}
}
}
}最高位优先就是反过来,从最高位开始划分,本质上是完全一致的贪心。
基数排序性质
- 空间复杂度:$O(N)$。(十个链表需要 $O(N)$ 的空间)
- 时间复杂度:$O(ND)$,其中 $D$ 表示最大数字的位数。另一种说法是 $O(D(N+R))$,其中 $R$ 表示有几个桶(也就是加上合并链表的复杂度)。
- 稳定性:稳定。
外部排序
外部排序(External sorting)是指能够处理极大量数据的排序算法。通常来说,外排序处理的数据不能一次装入内存,只能放在读写较慢的外存储器(通常是硬盘)上。
由于外部排序不能将数据全部读入内存,因此一般采用归并排序的思路来实现。
多路归并
假设现在要对大量的数据排序(假设一共 $2^{31}$ 个数字),那我们需要执行以下步骤:
- 首先将这些数据分为一系列的有序段(生成初始归并段)。这里简单起见,我们假设一共分成 $8$ 段,也就是说将这 $2^{31}$ 个数字分为 $8$ 个有序数组,每个数组 $2^{28}$ 个数字。
- 然后对这些有序数组执行二路归并排序,由于一个有 $8$ 段数字,因此需要执行总计 $3$ 趟归并排序。下面举例说明:
- 假设数据段分别为 $0,1,2,3,4,5,6,7$,那么第一趟归并之后,数据段 ${0,1},{2,3},{4,5},{6,7}$ 内部已经有序;
- 第二趟归并后 数据段 ${0,1,2,3},{4,5,6,7}$ 内部已经有序;
- 第三趟归并后,整个数组($8$ 个数据段)就完成排序。
这里我们统计一下外部读写(I/O)的次数,这是因为内部排序算法的过程往往较快,而内存和硬盘之间的读写很慢,所以外部排序需要重点优化外部读写的次数。假设一个“磁盘块”进/出内存只需要一次读写,那么上面给出的例子中一趟二路归并就需要 $32$ 次I/O($16$ 次读,$16$ 次写)。注意,这是因为多路归并的第一次划分每次会读入两个“磁盘块”,分别执行内部排序后写回磁盘。
于是,上方给出的多路归并的I/O次数就是:
$$
32+3\times 32=128
$$
第一个 $32$ 是生成初始归并段的I/O,后三个 $32$ 是 $3$ 趟归并的I/O。
减少I/O次数的一个有效方法是:执行多路归并。比如,我们改用 $4$ 路归并,那么我们就只需要 $2$ 趟归并就能完成排序了,于是I/O次数就减少为了:
$$
32+2\times 32=96
$$
一般地,对 $r$ 个初始归并段,作 $k$ 路归并排序,一共需要 $\lceil \log_k r\rceil$ 趟归并。因此减少I/O的主要方法就是两种:
- 增大 $k$。
- 减小 $r$ 。
败者树
多路归并虽然可以减少I/O次数,但是会增加内部归并时的比较次数($k$ 路归并时,选出当前最小的元素需要 $k-1$ 次比较)。针对这一问题,我们可以用构造败者树的思想进行优化:
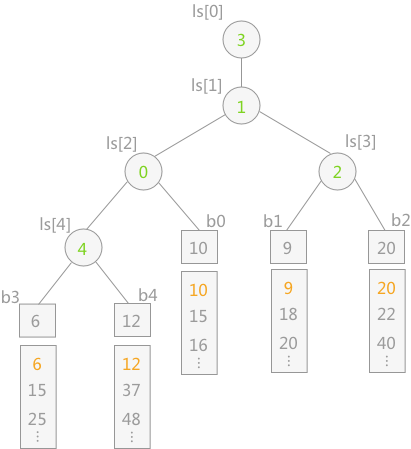
如图,这是一个 $5$ 路归并排序的败者树(败者树形式上近似于一个完全二叉树,和最小堆非常类似),每个非叶子节点记录了两个儿子节点中更大/小(取决于定义,图示是更大的节点,也就是比较的败者)的那个节点的下标(以 $ls[4]$ 为例,由于 $b3[0]=6\lt b4[0]=12$,因此权值为 $4$),然后胜者向上爬升一层,继续进行比较(以 $ls[2]$ 为例,由于 $ls[4]=4$,因此我们会比较 $b3[0]$ 和 $b0[0]$)。
构造一个 $k$ 路归并的败者树显然需要 $k-1$ 次比较。需要额外注意的是,败者树的最后一次比较会生成 $ls[0]$ 和 $ls[1]$ 两个节点(这是与完全二叉树唯一的不同点)。进行 $k$ 路归并时,败者树的树顶元素显然直接指向了当前最小元素的序列下标。
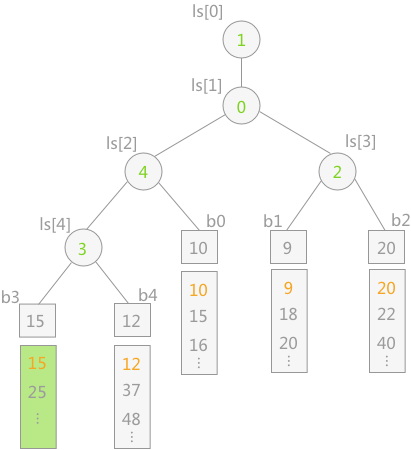
当我们取出了败者树的树顶元素(最小元素)后,如图所示,我们拿走了 $b3$ 序列的最小元素:
- 此时 $b3$ 的最小元素转变为了 $15$,显然其父节点的权值也有可能发生变化。由于 $15\gt 12$,因此需要更新 $ls[4]=3$,然后继续向上更新。(图示就更新到这一步为止)
- 由于 $b4$ 的队首元素 $12$ 大于 $b0$ 的队首元素 $10$,因此 $ls[2]$ 更新为 $4$,然后继续向上更新。
- 由于 $b1$ 的队首元素 $9$ 小于 $b0$ 的队首元素 $10$,因此 $ls[1]$ 更新为 $0$,$ls[0]$ 更新为 $1$。
显然,$k$ 路归并的败者树进行一次更新的复杂度取决于树高,为 $O(\log k)$。
置换-选择排序
前面提到过,外部排序减少I/O有两种策略,策略1是多路归并,策略2是减少初始归并段数。置换-选择排序就是策略2的一种实现。
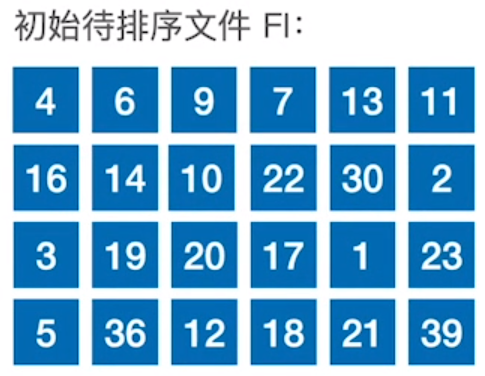
如上图,假设我们现在可用的内存空间为 $3$,那么按照一般策略,我们只能生成 $24\div 3=8$ 个初始段。但是,现在我们采用置换-选择排序生成初始段,过程如下:
- 维护一个大小为 $3$ 的小根堆,一开始将前 $3$ 个元素($4,6,9$)丢进堆中,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $4$。
- 将 $7$ 丢进小根堆,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $6$。(已取出的序列是 $4,6$,堆中剩余两个元素分别是 $7,9$)
- 将 $13$ 丢进小根堆,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $7$。(已取出的序列是 $4,6,7$,堆中剩余两个元素分别是 $9,13$)
- 将 $11$ 丢进小根堆,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $9$。(已取出的序列是 $4,6,7,9$,堆中剩余两个元素分别是 $11,13$)
- 将 $16$ 丢进小根堆,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $11$。(已取出的序列是 $4,6,7,9,11$,堆中剩余两个元素分别是 $13,16$)
- 将 $14$ 丢进小根堆,然后取出堆顶元素,并记录此时已取出元素最小值的最大值为 $13$。(已取出的序列是 $4,6,7,9,11,13$,堆中剩余两个元素分别是 $14,16$)
- 将 $10$ 丢进小根堆,然后取出堆顶元素,堆顶元素是 $10$,但是已取出元素最小值的最大值为 $13$,因此 $10$ 是不能丢进当前的初始段中的。此时 $10$ 暂存,小根堆的大小减小 $1$,然后再取出堆顶元素并记录此时已取出元素最小值的最大值为 $14$。(已取出的序列是 $4,6,7,9,11,13,14$,堆中剩余一个元素是 $16$)
- ……
- 一直重复上述操作,直到小根堆的大小为 $0$。然后我们就需要开辟一段新的初始段了。(本例中,最终生成的第一个初始段为 $4,6,7,9,11,13,14,16,22,30$)
最佳归并树
当我们采用置换-选择排序算法生成初始归并段时,每个归并段的长度就不一定是相同的了。此时进行归并排序时,为了减少I/O次数,我们可以按照每个归并段的长度对他们重新排列,并构造出一棵最佳归并树。
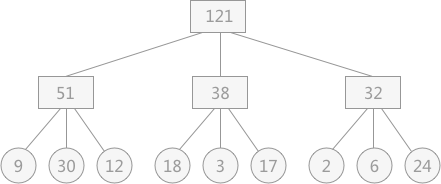
如上图,这是一个三路归并排序的归并树,叶子节点的权值表示数据段占用的“磁盘块”数量(也就是长度),那么这棵归并树的I/O次数实际上就是 $2\times WPL=2\times 2\times 121 = 484$ 次。($WPL$ 就是树的带权路径长度,详见哈夫曼树)
容易发现,实际上最佳归并树就是广义哈夫曼树($k$ 叉的哈夫曼树),因此构造策略也是和哈夫曼树完全一样的贪心策略。上图的最佳归并树如下图所示:
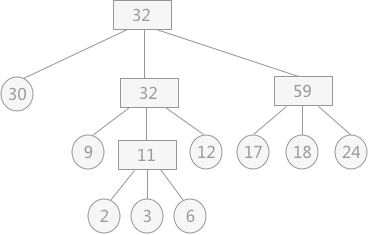
图中根节点的权值有误,实际上是 $121$(网上嫖的图,不改了)。
虚段
上方给出的例子是一个严格的三叉树,但是如果我们去掉一个节点(比如 $30$),那么构造出来的最佳归并树就至少有一个节点的度为 $2$。此时我们可以添加虚段(也就是点权为 $0$ 的点)使得最佳归并树可以成为严格的 $k$ 叉树,并在完成构造后删除这些权值为 $0$ 的虚段。
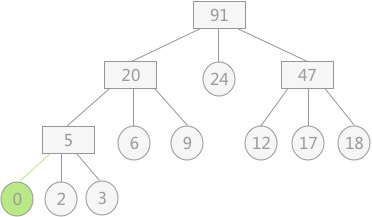
那具体要添加多少个虚段呢?可以这么考虑:一个严格的 $k$ 叉树的叶子节点个数一定为 $1+(k-1)t$,其中 $t$ 是常数。也就是说,执行 $k$ 路归并时,如果有 $r$ 个初始段,需要补虚段直到 $r\bmod{(k-1)}\equiv 1$。